Research Projects
Geometrically-Constrained Ground Texture SLAM Pipeline
My current work is exploring how geometric constraints can be be exploited throughout the entire SLAM pipeline to enhance localization accuracy and robustness. This work is currently in preparation for publication.
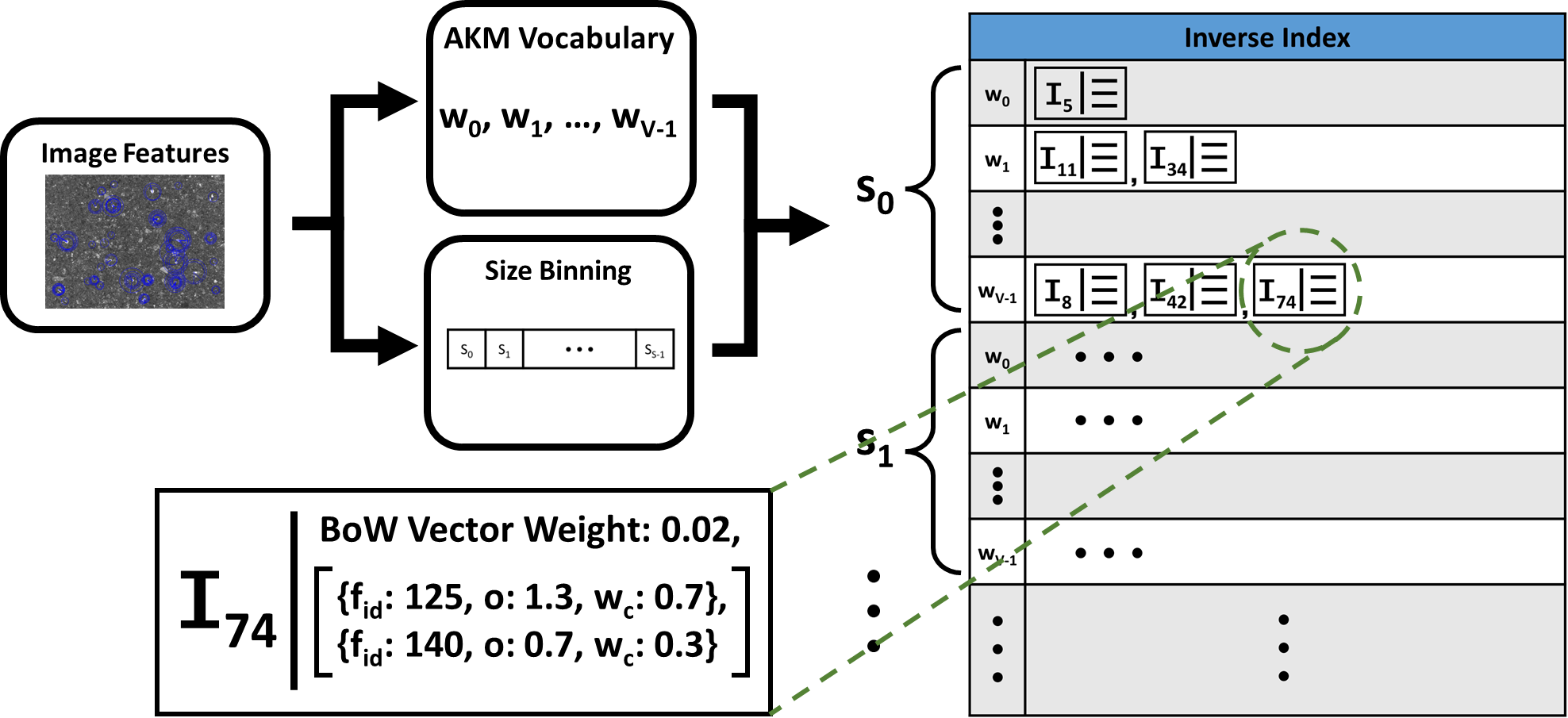
Improved Bag-of-Words Image Retrieval for Ground Texture Localization
I developed a significantly improved bag-of-words (BoW) image retrieval system specifically designed for ground texture localization. This system achieves substantially higher accuracy for global localization and higher precision and recall for loop closure detection in SLAM.
Key Contributions:
- Leverages an approximate k-means (AKM) vocabulary with soft assignment
- Exploits consistent orientation and constant scale constraints inherent to ground texture localization
- Provides both high-accuracy and high-speed versions for different use cases
Performance Highlights:
- Improved mean average precision from 0.026 to 0.559 for global localization
- Identified almost 3x as many loop closures for SLAM applications
Related Publication: "Improved Bag-of-Words Image Retrieval with Geometric Constraints for Ground Texture Localization" (ICRA 2025)
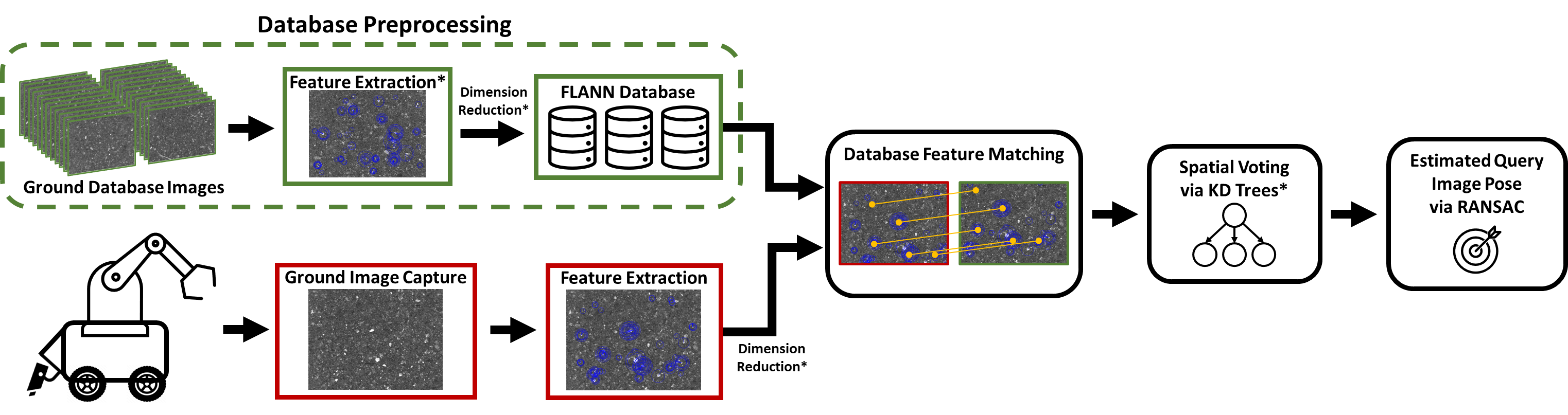
Lightweight Ground Texture Localization (L-GROUT)
I developed a lightweight ground texture localization algorithm that improves the state of the art in both performance and computational efficiency. This algorithm can run in real-time on single board computers without GPU acceleration, making it ideal for small indoor robots.
Key Contributions:
- Improved database feature extraction algorithm
- Dimensionality reduction method based on locality preserving projections (LPP)
- Enhanced spatial filtering for greater robustness
Performance Highlights:
- Achieved localization frequencies of ~4Hz on a Raspberry Pi 4
This work enables high-precision, millimeter-level localization without instrumenting, marking, or modifying the environment, making it accessible for a wide range of robotic applications.
Related Publication: "Lightweight Ground Texture Localization" (ICRA 2024)